I developed a control program in Python and PyQt5 to pilot the ROV, and designed aspects of the electronics control system and mechnical structure.
I designed a mini robot arm powered by geared NEMA 17 stepper motors that could me manufactured using laser cut acrylic.
I developed a graphical user interface to control my desktop robot arm using Python and PyQt5. The program can be used to train the arm to repeatedly perform movements.
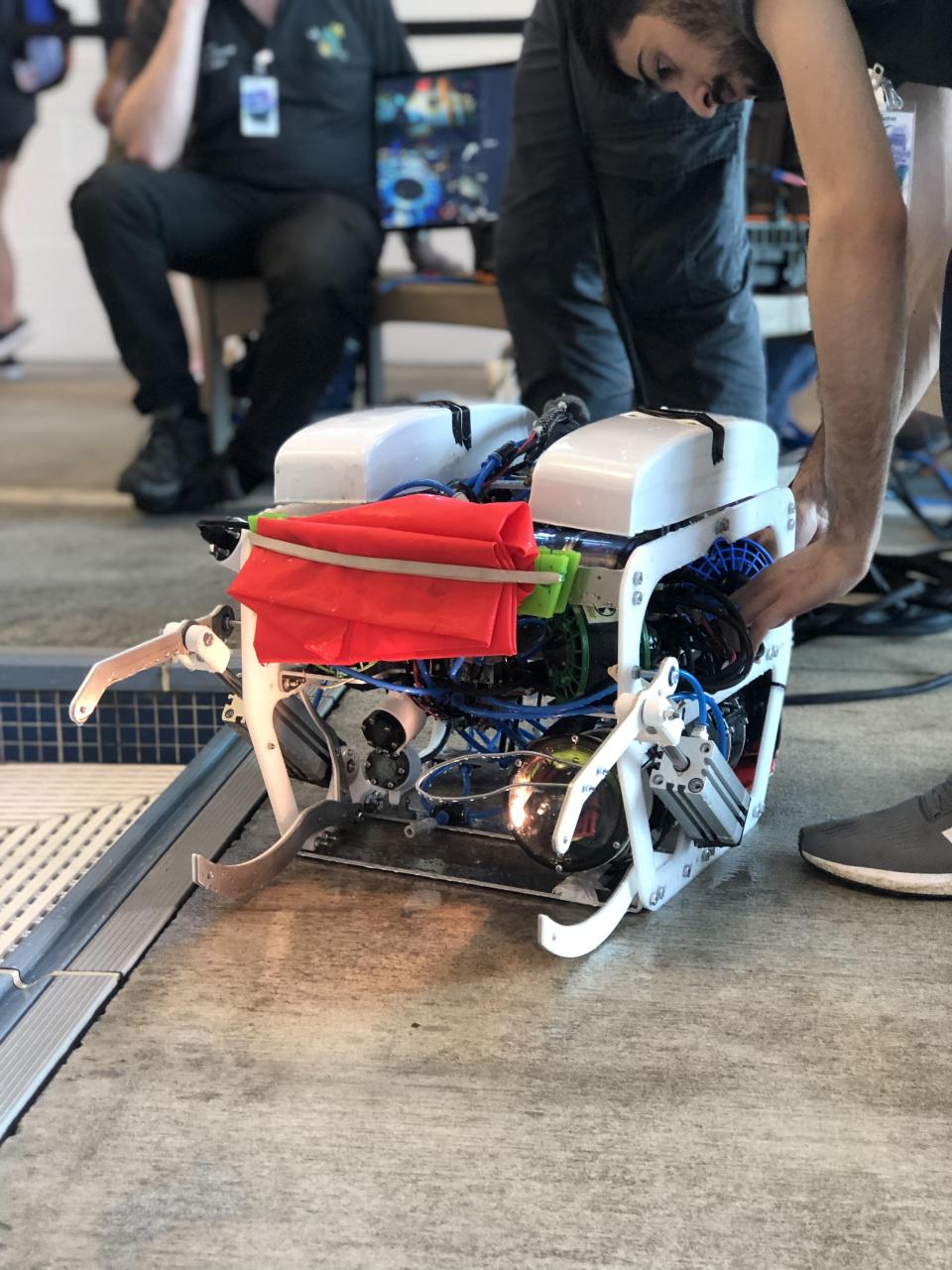
I developed a control program in Python and PyQt5 to pilot the ROV, and designed aspects of the electronics control system and mechnical structure.
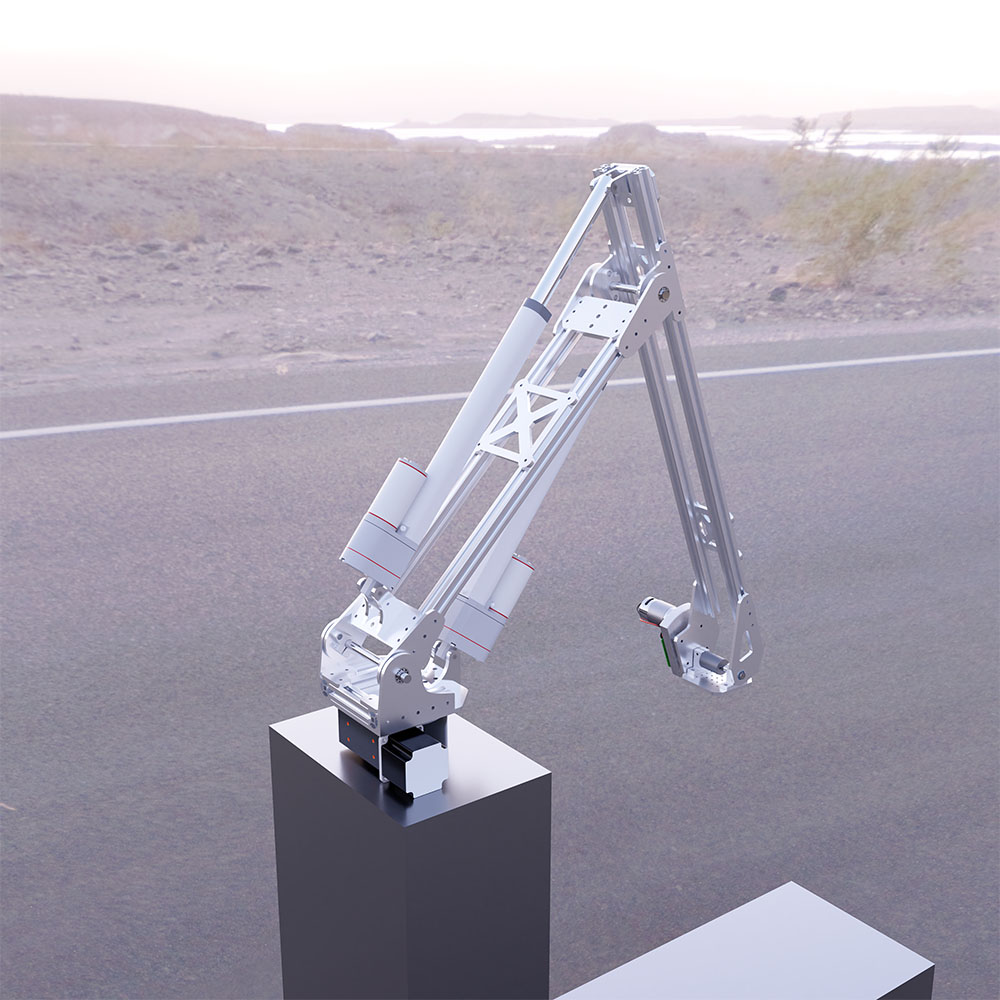
I designed a low-cost but high powered robot arm to mount onto a Mars Lunar Rover.

I developed an android application that connects to my robot arm via bluetooth to control its position. It can also record the cooridinates at different arm positions and play them back.
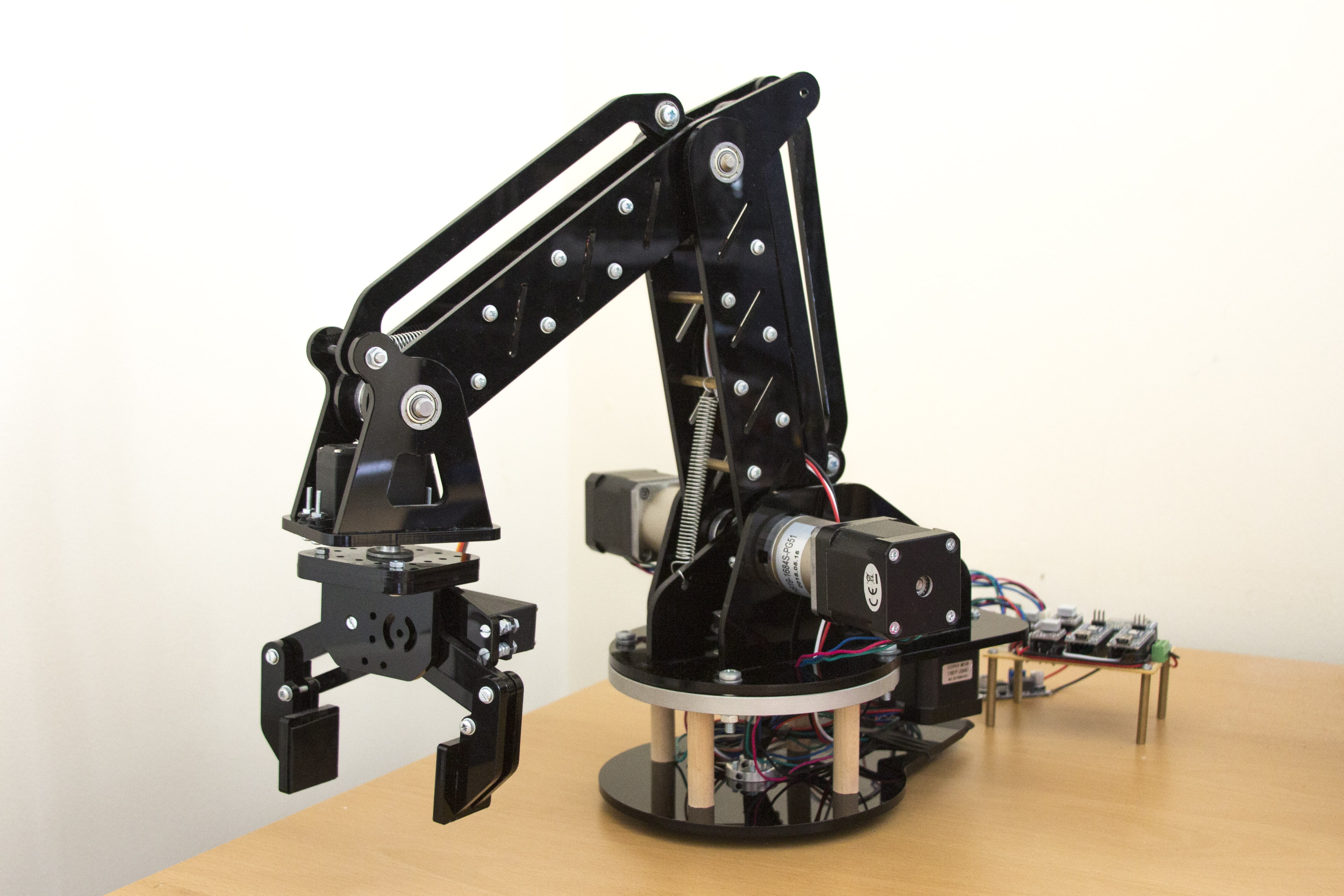
I designed and manufactured a miniature robot arm powered by geared NEMA 17 stepper motors was made from laser cut acrylic. The arm had 4 axes of rotation and used a parallelogram design to make sure they end effect was always level, no matter the position of the arm.
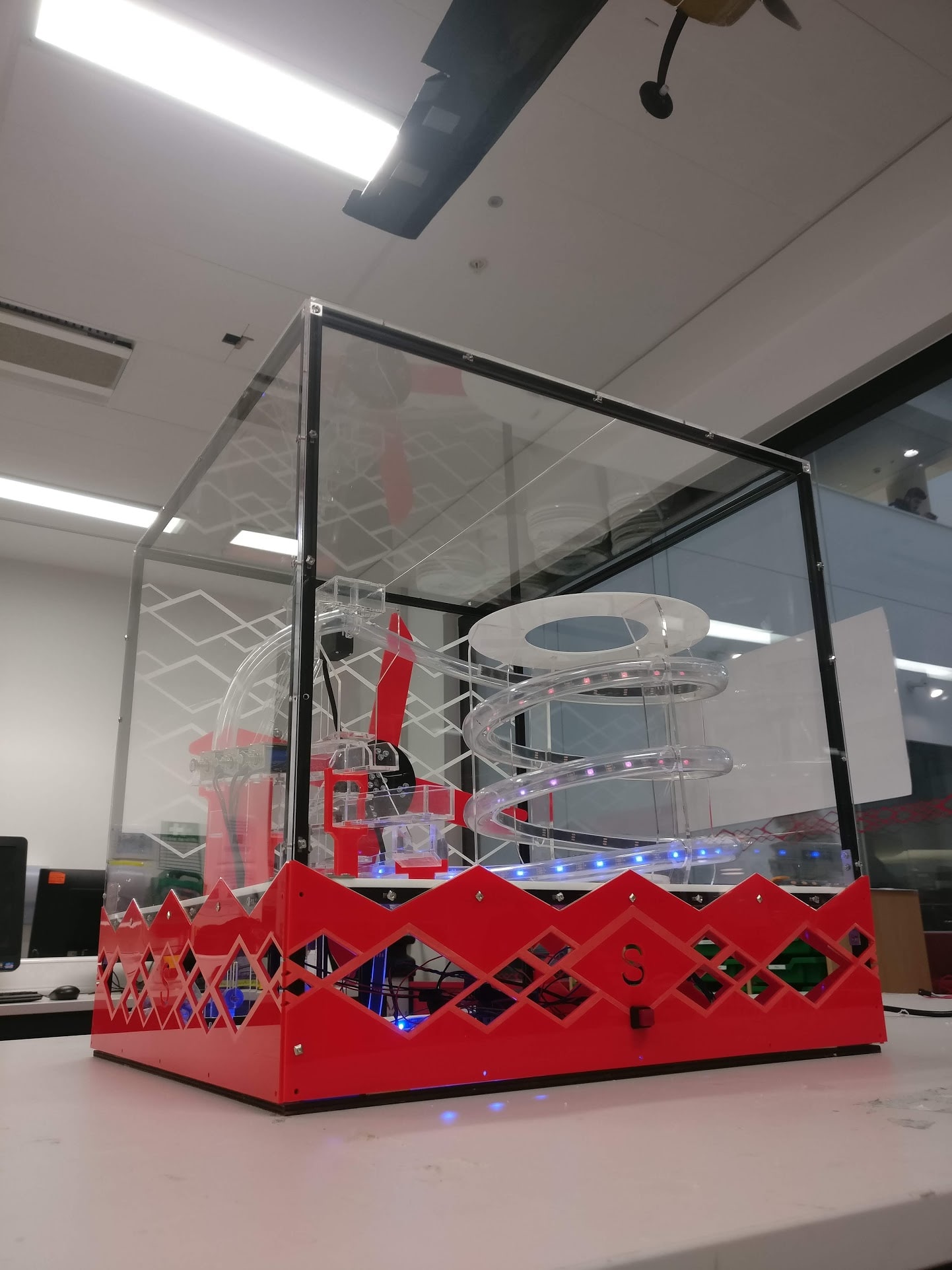
I competed in the Sir Williams Siemens Challenge organised by Siemens and held at The University of Sheffield over the course of 3 days. I was part of a multi-disciplinary student team from different univerties, where we designed and manufactured a marble run using the iForge facilities.
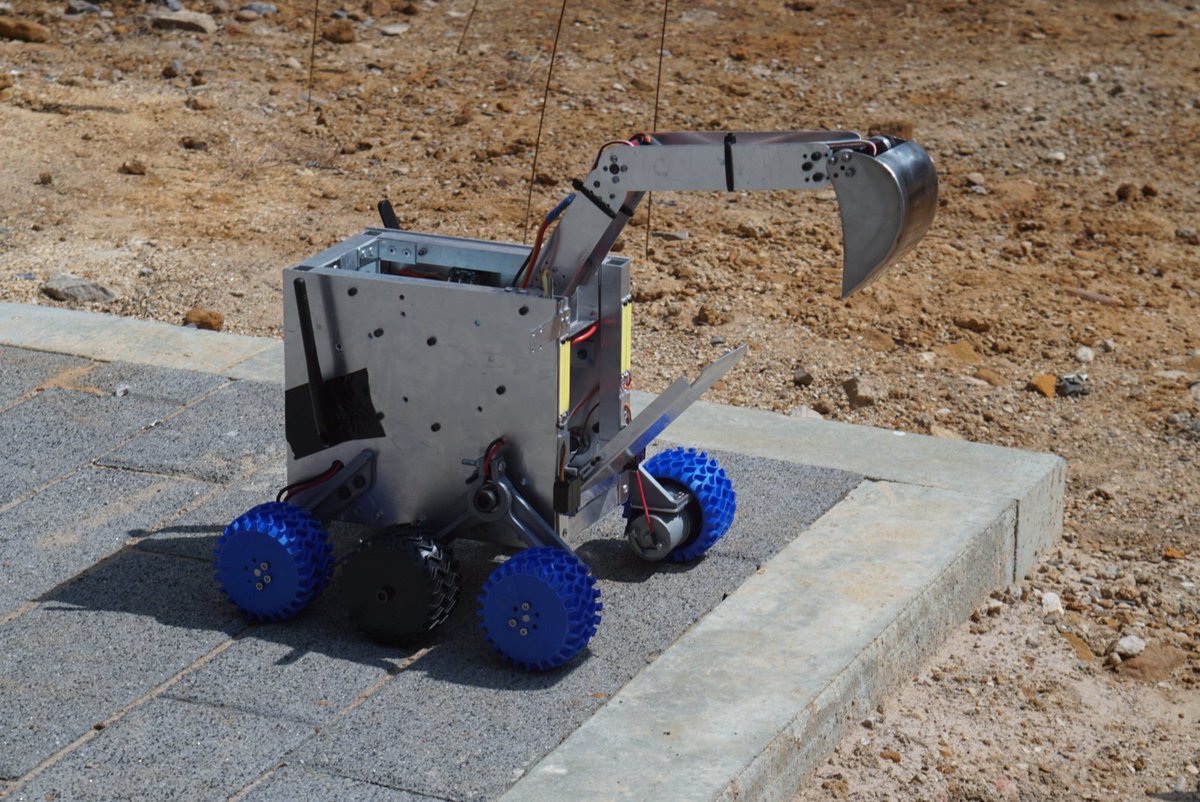
I was part of Team Moonworks at The University of Sheffield, where a lunar rover was designed and manufactured to be capable of traversing rough terrain. I developed an Android application that could control the rover via Bluetooth to test the locomotion system and robot arm during development.

I built a simple fan controller for my PC, that could toggle between three different speeds via a switch.

I built a simple clean amplification circuit using discrete components, and housed it inside a metal enclosure to use as a guitar effects pedal.

I needed a plug and play solution for my guitar effect chain. Rather than having to connect multiple effect pedals together every time I use my setup, I designed and manufactured a custom pedal board from plywood, with dedicated isolated power supplies.